
Particle Filter SLAM
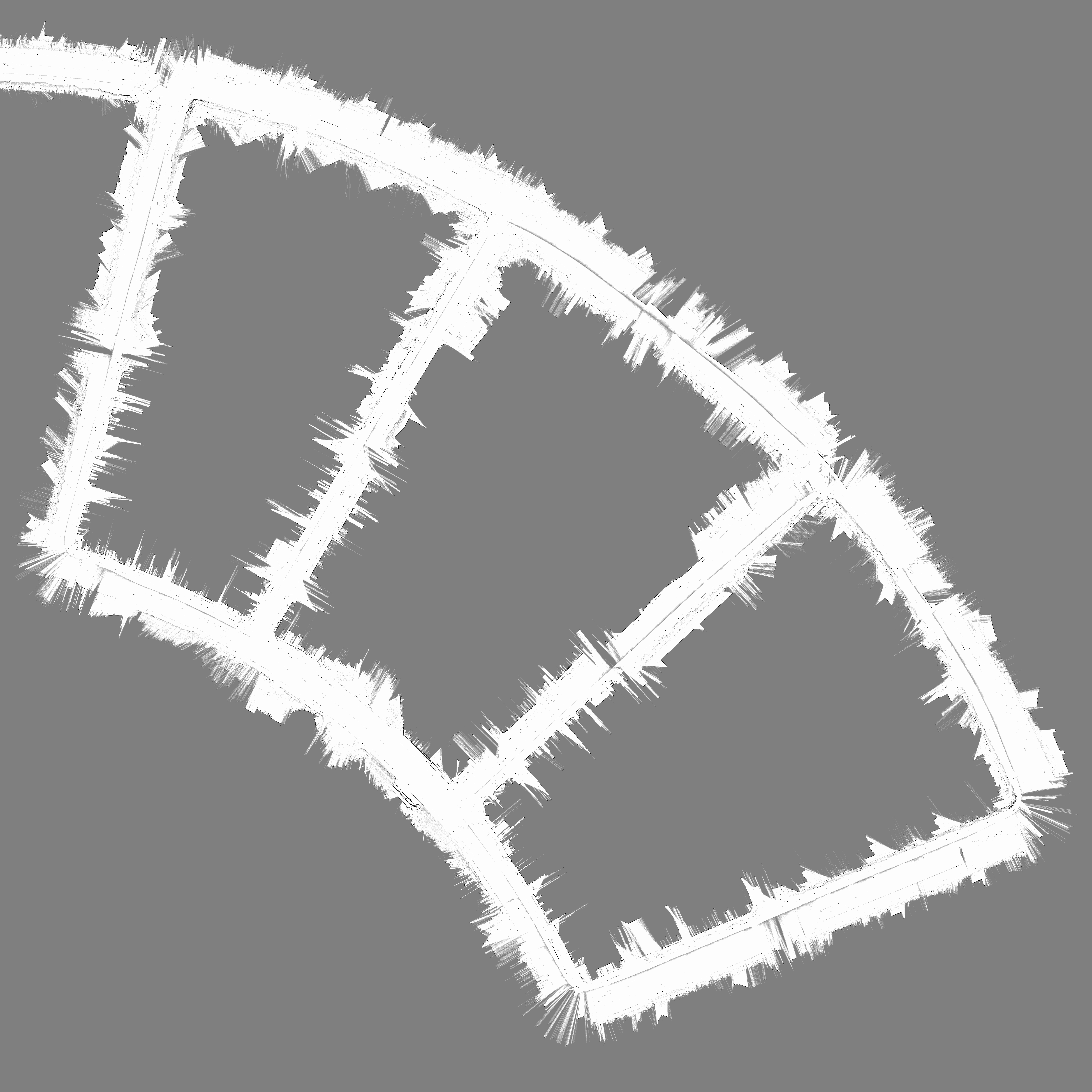 Above is the recreated map. Given LIDAR and IMU observations of a real self-driving dataset, I developed a preliminary(no loop closure) SLAM algorithm based on occupancy map and particle filter.
Above is the recreated map. Given LIDAR and IMU observations of a real self-driving dataset, I developed a preliminary(no loop closure) SLAM algorithm based on occupancy map and particle filter.
View report here: ECE 276A PR2 report