XIMU - compact localization sensor bundle & ROS processing
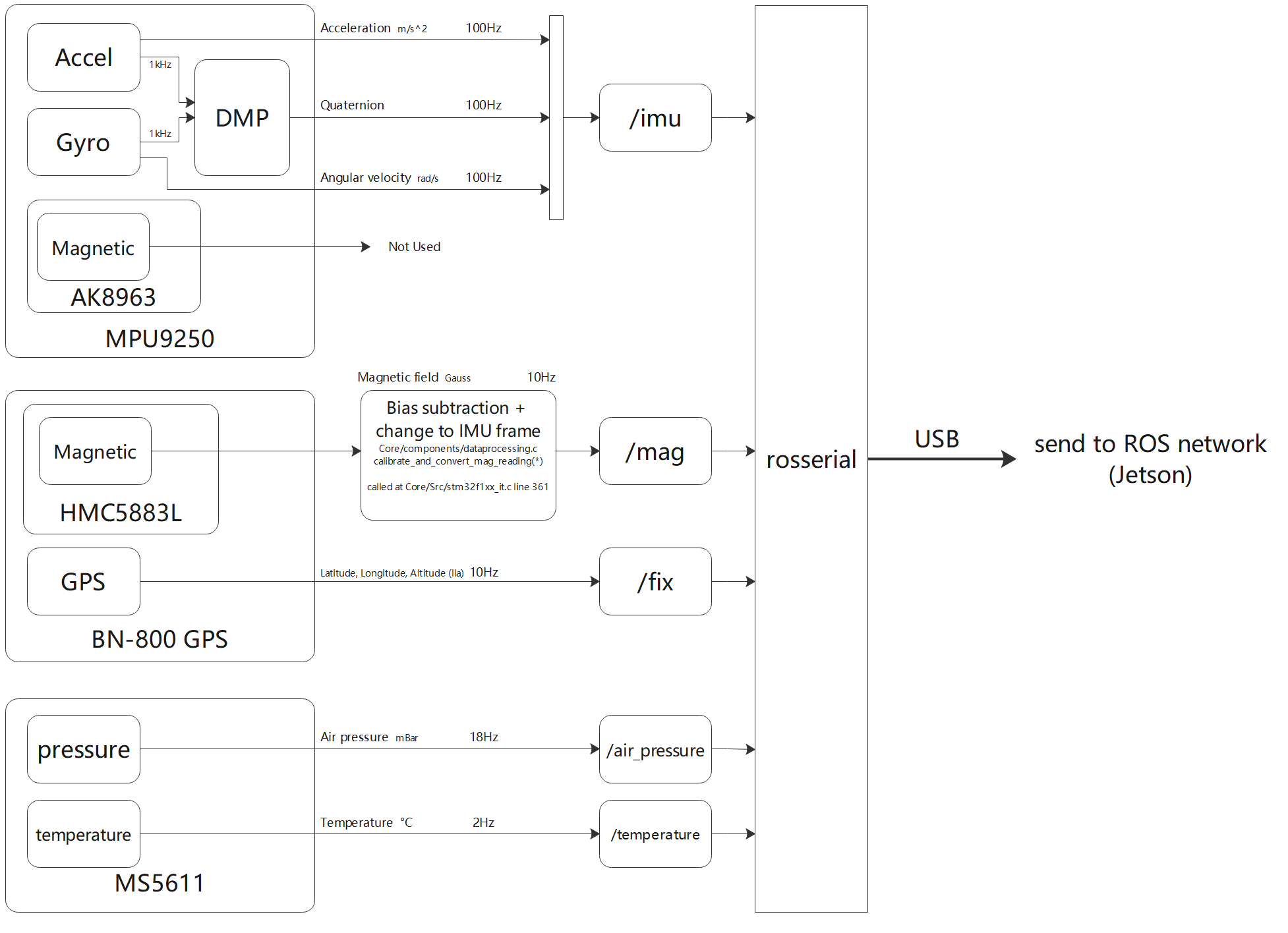
This module is designed for localization need of my club Yonder Dynamics. I designed a compact PCB that holds IMU, pressure sensor, GPS, and magnetometer and communicates all information to ROS network through a ported rosserial package. I also learned to use ESKF to fuse all information.
Module
Github link: link

Processing
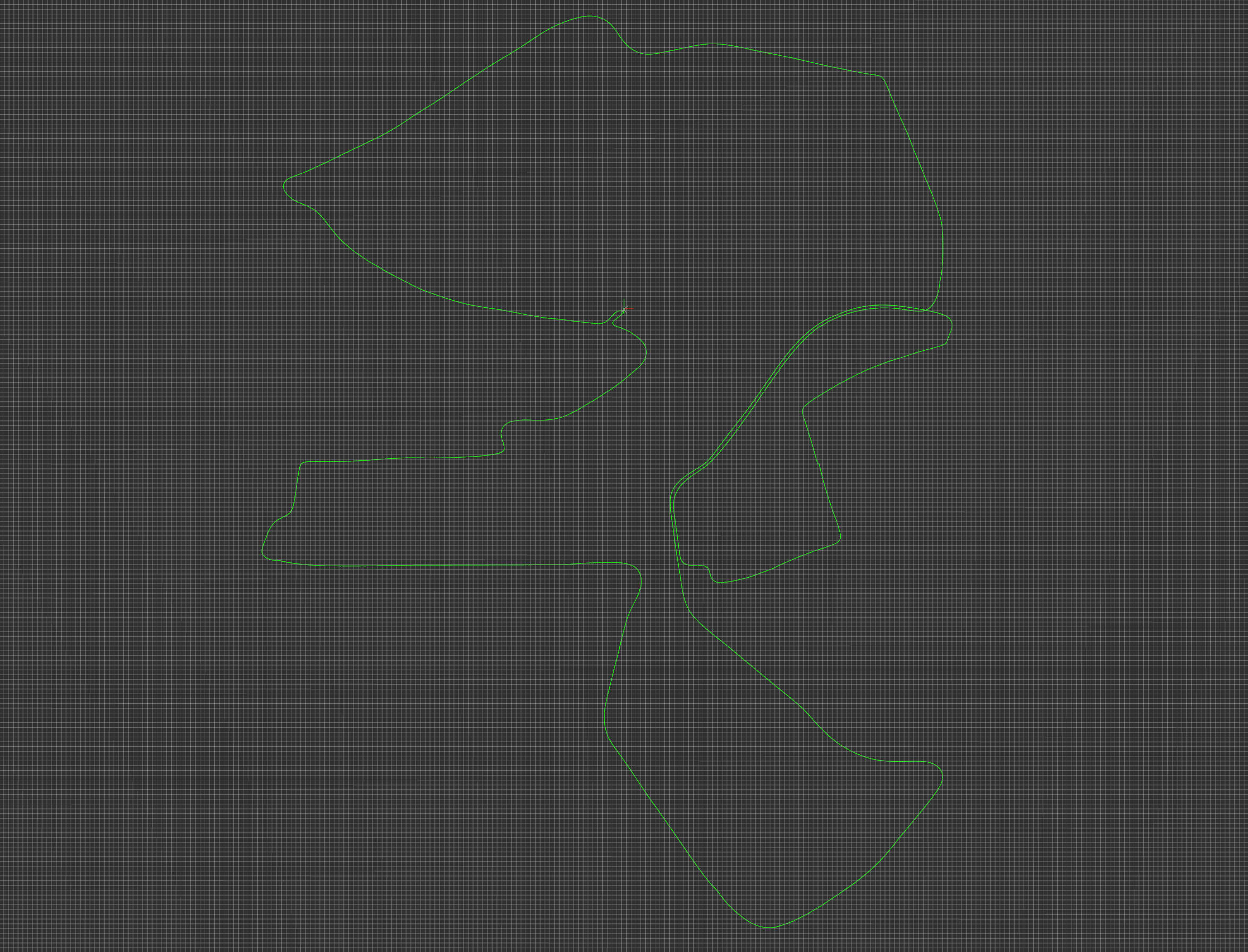
I learned to use ESKF to fuse all information. Below is my processing algorithm ran on utbm dataset for validation.